| Titolo Task | Nutrient recovery from wastes to produce mineral fertilisers and promoting water recovery |
|---|---|
| Ente | Politecnico di Torino |
| Quale bisogno soddisfa | Il progetto mira a sviluppare un robot mobile per l'applicazione di precisione del fertilizzante innovativo sviluppato da questa spoke di ricerca. Il robot è destinato a mappare e monitorare il suolo e le colture prima e dopo l'applicazione del fertilizzante per testarne l'efficacia in campo. Le attività di monitoraggio prima dell'applicazione guidano anche l'attività di fertilizzazione, applicando la quantità corretta di fertilizzante solo quando e dove è necessario. |
| Descrizione | L’obiettivo è sviluppare una piattaforma robotica mobile innovativa per l’integrazione e la verifica di strategie di agricoltura di precisione, con particolare attenzione sulla fertilizzazione, in aziende agricole o serre dedite all’orticoltura. Le funzioni principali del robot sono quindi il monitoraggio continuo dello stato delle colture al fine di mappare ed eseguire interventi solo dove e quando è necessario al fine di ottimizzare sia la resa agricola che l’utilizzo delle risorse. Il robot è omnidirezionale per ottenere un elevato grado di navigabilità e agilità anche in spazi ristretti dove le manovre tradizionali non sarebbero possibili. La sua struttura a telaio poi permette l’accesso delle colture dall’alto in modo da poter focalizzare le attività anche su una sola pianta se necessario. Il robot è riconfigurabile nelle sue dimensioni, in particolare la carreggiata, per adattarsi facilmente a differenti sesti d’impianto. Infine, il robot è modulare, permettendo l’integrazione di differenti sensori, attrezzi o accessori per adattarsi alle attività richieste. |
| Numero Task | 8.3.1 |
| Docente di riferimento | Giuseppe |
| Quaglia | |
| giuseppe.quaglia@polito.it | |
| Target | Questa soluzione è pensata per le aziende agricole e le serre di orticoltura, con l'obiettivo di ottimizzare le attività di monitoraggio e manutenzione delle piante. La struttura a portale consente al robot di passare sulle piante permettendo diverse attività. Inoltre, il robot può variare la sua carreggiata per adattarsi a diverse distanze tra filari. Automatizzando queste attività, il robot migliora l'efficienza operativa, favorisce la crescita delle piante e contribuisce ad aumentare la resa. |
| Abstract grafico della soluzione | 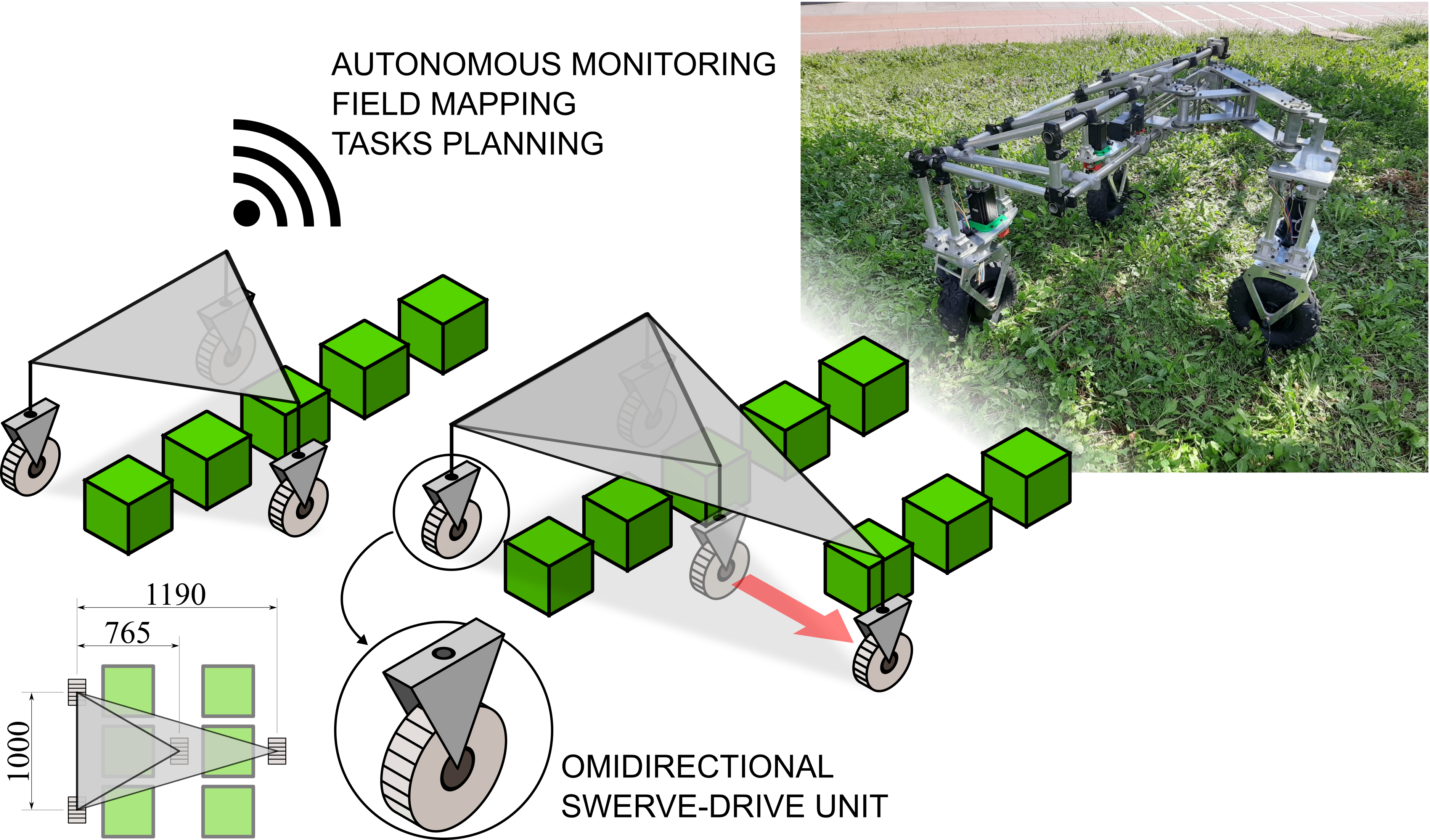 |
| Nome | Giuseppe |
| Quaglia | |
| giuseppe.quaglia@polito.it | |
| Ente | Politecnico di Torino |
| Nome | Carmen |
| Visconte | |
| carmen.visconte@polito.it | |
| Ente | Politecnico di Torino |
| Nome | Andrea |
| Botta | |
| andrea.botta@polito.it | |
| Ente | Politecnico di Torino |
| Task leader | Andrea Turolla |
| WP leader | Fabrizio Adani |
| TRL iniziale | 2,0 |
| TRL attuale | 3,0 |
| TRL finale | 5,0 |
